Example 4: Numerical error as a function of \( \Delta t \)
In this example we will assess how the error of our implementation of the Euler method depends on the time step \( \Delta t \) in a systematic manner. We will solve a problem with an analytical solution in a loop, and for each new solution we do the following:
- Divide the time step by two (or double the number of time steps)
- Compute the error
- Plot the error
log_error = np.log10(abs_error[1:]).
# chapter1/programs_and_modules/Euler_timestep_ctrl.py;DragCoefficientGeneric.py @ git@lrhgit/tkt4140/allfiles/digital_compendium/chapter1/programs_and_modules/DragCoefficientGeneric.py;
from DragCoefficientGeneric import cd_sphere
from matplotlib.pyplot import *
import numpy as np
# change some default values to make plots more readable
LNWDT=5; FNT=11
rcParams['lines.linewidth'] = LNWDT; rcParams['font.size'] = FNT
font = {'size' : 16}; rc('font', **font)
g = 9.81 # Gravity m/s^2
d = 41.0e-3 # Diameter of the sphere
rho_f = 1.22 # Density of fluid [kg/m^3]
rho_s = 1275 # Density of sphere [kg/m^3]
nu = 1.5e-5 # Kinematical viscosity [m^2/s]
CD = 0.4 # Constant drag coefficient
def f(z, t):
"""2x2 system for sphere with constant drag."""
zout = np.zeros_like(z)
alpha = 3.0*rho_f/(4.0*rho_s*d)*CD
zout[:] = [z[1], g - alpha*z[1]**2]
return zout
# define euler scheme
def euler(func,z0, time):
"""The Euler scheme for solution of systems of ODEs.
z0 is a vector for the initial conditions,
the right hand side of the system is represented by func which returns
a vector with the same size as z0 ."""
z = np.zeros((np.size(time),np.size(z0)))
z[0,:] = z0
for i in range(len(time)-1):
dt = time[i+1]-time[i]
z[i+1,:]=z[i,:] + np.asarray(func(z[i,:],time[i]))*dt
return z
def v_taylor(t):
# z = np.zeros_like(t)
v = np.zeros_like(t)
alpha = 3.0*rho_f/(4.0*rho_s*d)*CD
v=g*t*(1-alpha*g*t**2)
return v
# main program starts here
T = 10 # end of simulation
N = 10 # no of time steps
z0=np.zeros(2)
z0[0] = 2.0
# Prms for the analytical solution
k1 = np.sqrt(g*4*rho_s*d/(3*rho_f*CD))
k2 = np.sqrt(3*rho_f*g*CD/(4*rho_s*d))
Ndts = 4 # Number of times to divide the dt by 2
legends=[]
error_diff = []
for i in range(Ndts+1):
time = np.linspace(0, T, N+1)
ze = euler(f, z0, time) # compute response with constant CD using Euler's method
v_a = k1*np.tanh(k2*time) # compute response with constant CD using analytical solution
abs_error=np.abs(ze[:,1] - v_a)
log_error = np.log10(abs_error[1:])
max_log_error = np.max(log_error)
#plot(time, ze[:,1])
plot(time[1:], log_error)
legends.append('Euler scheme: N ' + str(N) + ' timesteps' )
N*=2
if i > 0:
error_diff.append(previous_max_log_err-max_log_error)
previous_max_log_err = max_log_error
print 10**(np.mean(error_diff)), np.mean(error_diff)
# plot analytical solution
# plot(time,v_a)
# legends.append('analytical')
# fix plot
legend(legends, loc='best', frameon=False)
xlabel('Time [s]')
#ylabel('Velocity [m/s]')
ylabel('log10-error')
savefig('example_euler_timestep_study.png', transparent=True)
show()
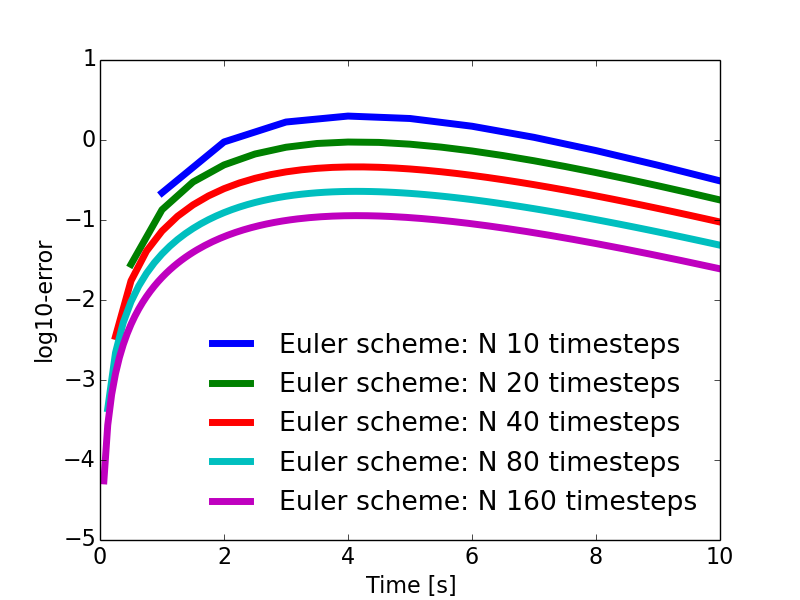
The plot resulting from the code above is shown in Figure (5). The difference or distance between the curves seems to be rather constant after an initial transient. As we have plotted the logarithm of the absolute value of the error \( \epsilon_i \), the difference \( d_{i+1} \) between two curves is \( d_{i+1}= \log10 \epsilon_{i}-\log10 \epsilon_{i+1} = \displaystyle \log10 \frac{\epsilon_{i}}{\epsilon_{i+1}} \). A rough visual inspection of Figure (5) yields \( d_{i+1} \approx 0.3 \), from which we may deduce: $$ \begin{equation} \log10 \frac{\epsilon_{i}}{\epsilon_{i+1}} \approx 0.3 \Rightarrow \epsilon_{i+1} \approx 10^{-0.3}\, \epsilon_{i} \approx 0.501\, \epsilon_{i} \tag{47} \end{equation} $$
The print statement print 10**(np.mean(error_diff)),
np.mean(error_diff) returns 2.04715154702 0.311149993907, thus we
see that the error is reduced even slightly more than the
theoretically expected value for a first order scheme, i.e. \( \Delta t_{i+1} = \Delta t_{i}/2 \) yields \( \epsilon_{i+1} \approx\epsilon_{i}/2 \).
Figure 5: Plots for the logarithmic errors for a falling sphere with constant drag. The timestep \( \Delta t \) is reduced by a factor two from one curve to the one immediately below.